高精度な作業が楽にできる! 超音波式トラクタ自動操舵システム
十勝農試 研究部 生産システムグループ
1.背景と目的
農作業人口の減少、高齢化などの要因から経営耕地面積に見合った人数の熟練作業者確保が困難な状況にあり、基幹オペレータの負担増や生産性の低下が指摘されるとともに、新規就農者や異業種参入者等の農作業に未熟練なオペレータでも高精度な農作業が実行可能なサポート技術が求められている。そこで本研究では未熟練作業者の作業精度向上や農作業オペレータの疲労軽減のため、超音波式のトラクタ自動操舵システムの作業特性を明らかにすることを目的とした。
2.試験方法
1)自動操舵による畝追従精度の評価
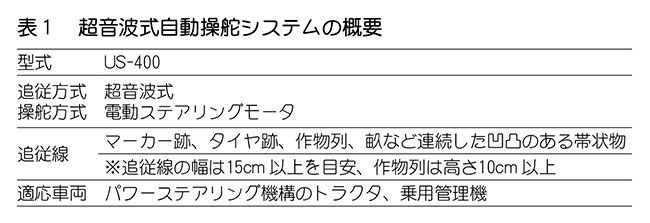
超音波式の自動操舵システム(ライハート社製、US-400、表1)を供試し、場内では自動操舵、手動(熟練、未熟練)、直線曲線、作業速度の組み合わせにより試験を実施した。畝追従性の評価は、RTKGPS により測定した畝切り時および本作業時の作業軌跡のずれを1m間隔で算出した。現地では、てんさい移植、ながいもトレンチャを対象に畝追従性を調査した。
2)自動操舵システム利用の効果に関する調査
自動操舵システム使用者へのアンケート(配布28件、回収17件)を実施し、導入理由、使用作業、使用後の評価を調査した。
3.成果の概要
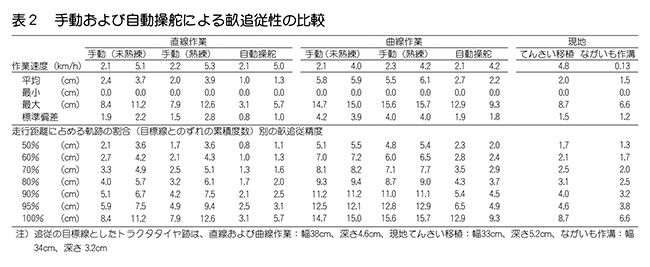
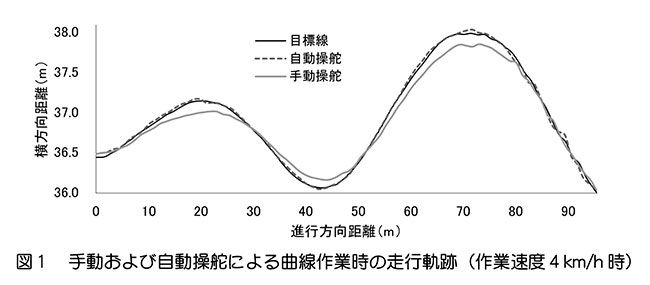
1 )場内での直線作業における目標線からのずれは、手動では作業速度2km/h 時で平均2cm 程度、5km/h 時では平均4cm 程度であったが、自動操舵では速度によらず1cm 程度であった。曲線作業において手動では曲線箇所で目標線に対して内側にずれるのに対し、自動操舵ではほぼ目標線に沿った操舵が可能であった(図1)。このため、目標線からのずれは、手動では平均6cm 前後であったのに対し、自動操舵では手動よりも小さく平均2.5cm 前後であった(表2)。
2 )現地でのてんさい移植時の自動操舵システムによる目標線からのずれは平均約2cm で、走行距離の80%が3.1cm 以内、90%が4cm 以内であった。作業速度0.13km/h 程度の超低速で実施したながいもトレンチャによる作溝時における目標線からのずれは平均1.5cm で、走行距離の95%が3.8cm 以内であった(表2)。
3 )超音波式自動操舵システムは、ばれいしょ収穫・植え付け、てんさい移植、ながいもトレンチャなどで利用されており、導入理由は、人手不足が最も多く、次いで作業精度の向上と疲労軽減であった。
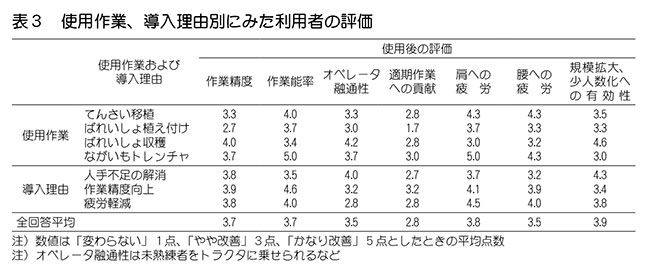
4 )使用後の評価は、てんさい移植やながいもトレンチャでは作業能率向上や疲労軽減に対するポイントが高かった(表3)。ばれいしょ収穫ではオペレータの融通性に対する評価が高く、規模拡大や少人数化への有効性に対するポイントが高かった。導入理由が人手不足解消の場合は、オペレータの融通性に対するポイントが高く、疲労軽減の場合は使用後の評価としても疲労軽減に対するポイントが高いことから、導入時に期待した効果がほぼ発揮されていると推察された。これらのことから自動操舵システムは、農作業人員の少人数化や大規模化を支援する技術として役立つと考えられる。
4.成果の活用面と留意点
1 )走行精度向上や疲労軽減を目的としたオペレータの支援技術として活用できる。利用に際してはトラクタオペレータの乗車を基本とする。
2 )傾斜地や極度な曲線・高速作業、目標ラインの幅や凹凸が不十分の場合は追従できない場合があることに留意する。
詳しい内容については、次にお問い合わせ下さい。
道総研十勝農業試験場 生産システムグループ
電話(0155)62-2431 E-mail:tokachi-agri@hro.or.jp