民間初のロケット打ち上げ
「大樹からの挑戦」
インターステラテクノロジズ(IST、本社大樹町、稲川貴大社長)の観測ロケット「MOMO(モモ)」2号機の打ち上げ時期が、6月30日に決まった。当初予定した4~5月の発射が延期になって以降、ISTは不具合の修正実験を重ね、再び民間企業単独では初となる宇宙空間(高度100km以上)到達を目指す。「大樹からの挑戦」では、初号機(1号機)から2号機への改良点、ISTの歩み、打ち上げ実験の概要などを動画と映像で紹介する。

ロケット打ち上げまでの歩み

〈2018.5.25〉4月の打ち上げで判明した不具合の修正実験のため発射点に立てられたMOMO2号機

〈2018.6.19〉打ち上げ前の最終リハーサルを行うIST社員

〈2018.4.30〉記者会見で打ち上げ延期を発表する(左から)稲川社長と堀江氏

〈2018.4.29〉4月29日の打ち上げが延期され、機体点検のため横位置に戻されるMOMO2
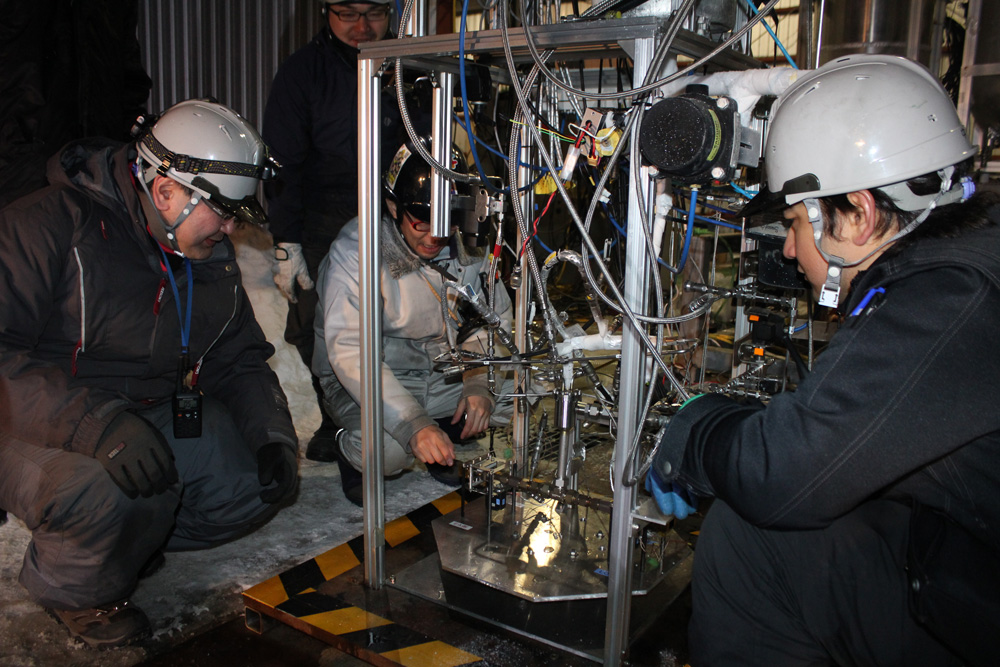
〈2018.2.28〉MOMO2号機の姿勢制御装置の長時間燃焼に成功

〈2017.7.30〉発射台から打ち上げられたISTの観測ロケット「MOMO」。打ち上げの80秒後に緊急停止され、約8km先の海上に着水した。

〈2017.7.7〉都内のDMM.com本社で記者会見を開き、観測ロケット「MOMO」の初号機打ち上げを7月29日に行うと発表した。

〈2017.5.29〉観測ロケット「MOMO」が宇宙空間に到達するまでに必要な120秒間の燃焼試験。異常は見られず、エンジン開発は完了した。

〈2017.1.16〉ロケットエンジンを縦向きに燃焼させる試験を実施。燃焼した状態で姿勢制御機構が動くことを確認した。

〈2016.5.18〉「LEAP」3号機実験。前年9月の2号機で成功した機体を垂直に飛ばす姿勢制御に加え、傾いた機体を垂直に戻す誘導技術も確認できた。

〈2013.8.10〉6号機となる小型液体燃料ロケット「すずかぜ」打ち上げ。高度は6.5キロ、最大速度マッハ1.12を記録した。
インターステラテクノロジズの軌跡
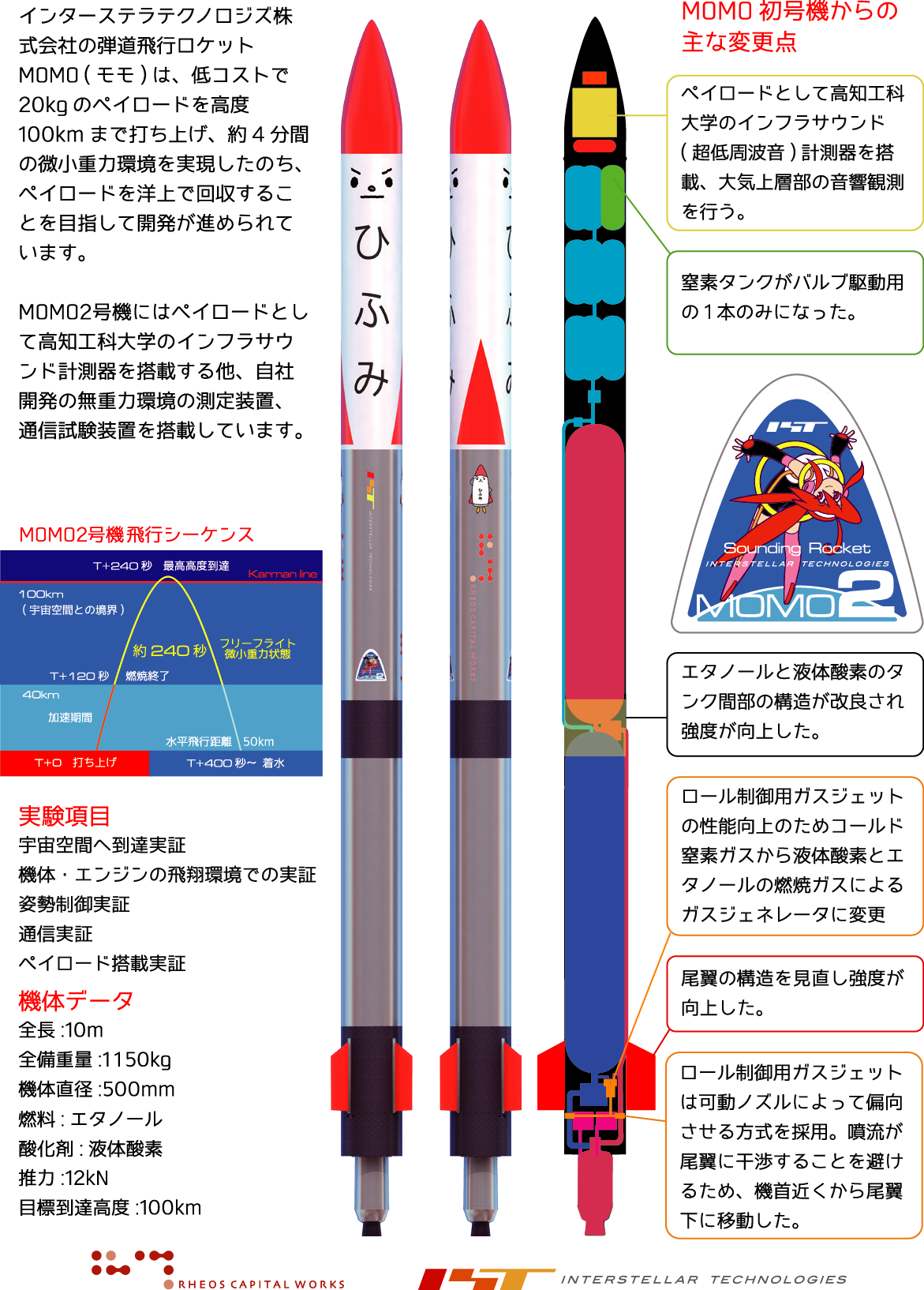
初号機(1号機)からの変更点
大きな変更点は ①姿勢制御 ②強度向上 ③ペイロード(荷物)-の3つ。
姿勢制御は、1号機の窒素ガス噴射で制御する仕組みから、ロケットエンジンと同系統のエタノール燃料を少量燃やし、ガスを可動ノズルから噴射する方式に変更。制御能力は5倍、軽量化にも成功した。軽量化で機体の強度が向上。機材の厚さを増し、尾翼も強化した。強度を高めても、制御機構の軽量化で機体重量は1号機とほぼ同じだ。
機体先端部内に搭載する③ペイロードは、高知工科大学の装置。津波や火山噴火時に生じる大気の震動(インフラサウンド)を観測する。成功すれば、民間企業単独開発の観測ロケットを使った日本初の実験実績となる。
ロケットが打ち上げ可能な要件
- 平均地上風速が5m以下
- 視程(水平方向に見通せる最長距離)600m以上
- 低層雲や雨雲、波高など海上監視のレーダーに影響を与えない
- 降雨量が1時間8mm以下
- 周辺半径10km以内に落雷がない―など。
最高到達高度100km

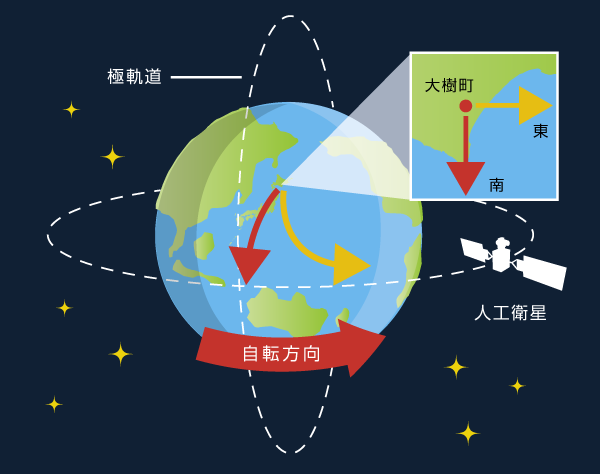
大樹町が射場に適している理由
南東に海のある地形のため、地球の自転の力を利用する東方向の他、極軌道に衛星を投入する南方向の打ち上げにも有利。
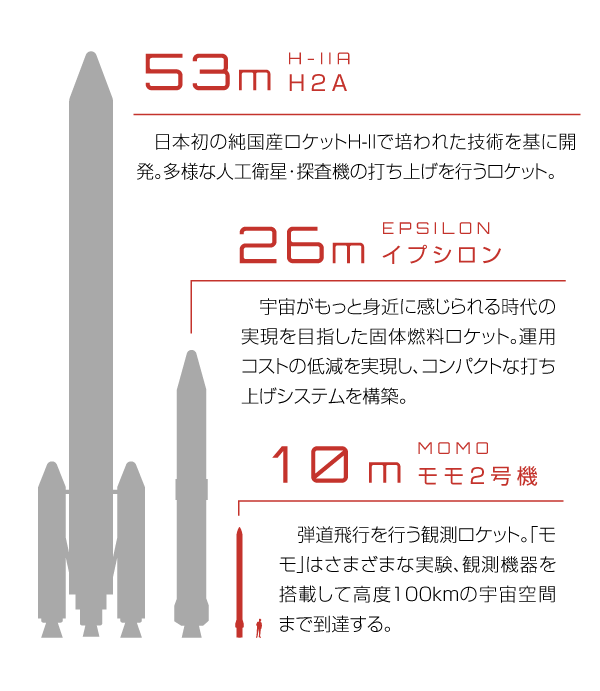
ロケットの大きさ比較